
About
Researcher and engineer with core expertise in autonomous robot perception and localization, multi-modal sensor calibration and fusion. Hands-on experience in deep learning-based robot perception system.
Currently I am a Ph.D. student at the School of Electrical and Electronic Engineering, advised by Prof. Wang Dan Wei. Prior to this, I obtained a M.Sc. degree in Computer, Control and Automation from Nanyang Technological University; and B.E. degree with First Class Honours from the joint program between the University of Glasgow and University of Electronic Science and Technology of China.
Featured Projects
Robotics / Localization
Localize the robot with a novel modality in challenging environements.

Sentosa Passenger Counting System
2021-2023Computer Vision / Target Detection
A RGBD-based system for real-time passenger counting and seat occupancy detection on Sentosa open-air trams.
Robotics / Calibration
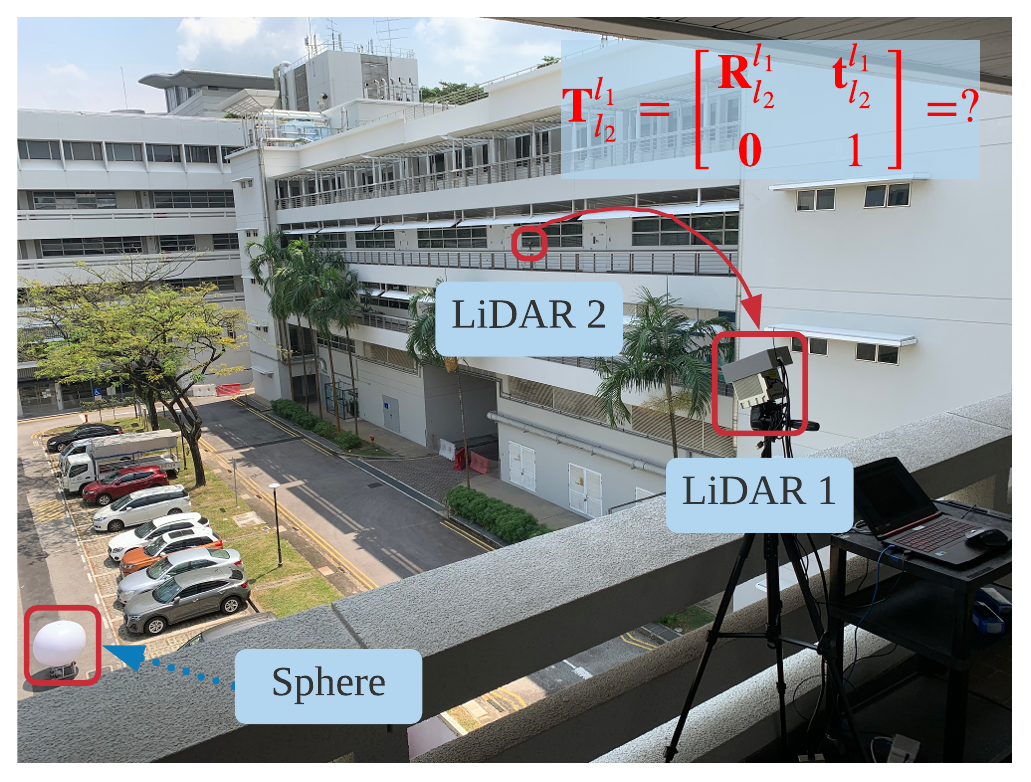
A calibration framework for long-baseline multi-LiDAR systems to accurately align distant sensors in V2X traffic scenarios.
Selected Publications
View All →UniLGL: Learning Uniform Place Recognition for FOV-Limited/Panoramic LiDAR Global Localization
Hongming Shen, Xun Chen, Yulin Hui, Zhenyu Wu, Wei Wang, Qiyang Lyu, Tianchen Deng, Danwei Wang
IEEE Transactions on Robotics
L2M-Calib: One-Key Calibration Method for LiDAR and Multiple Magnetic Sensors
Qiyang Lyu, Wei Wang, Zhenyu Wu, Hongming Shen, Huiqin Zhou, Danwei Wang
2025 IEEE 28th International Conference on Intelligent Transportation Systems (ITSC)
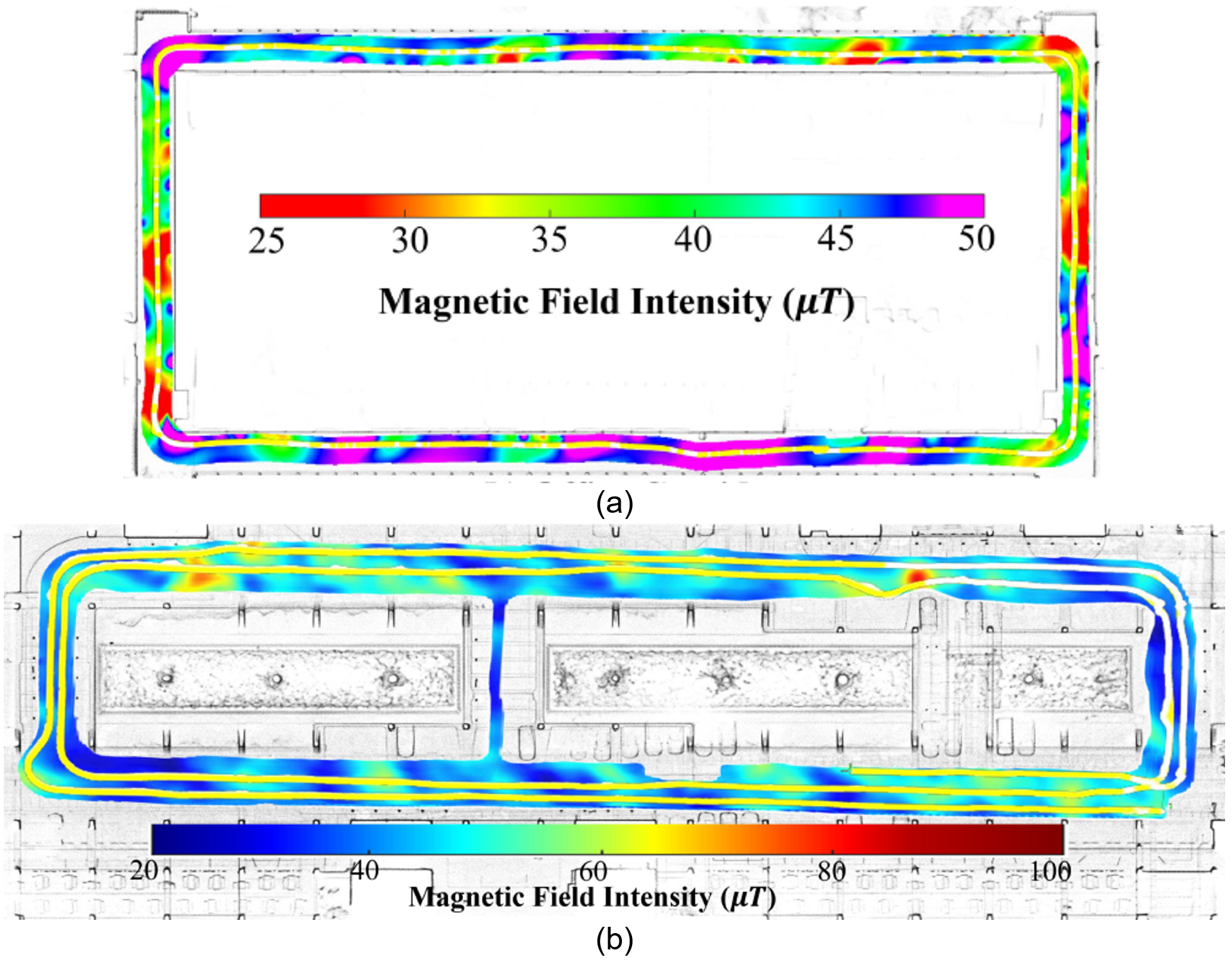
IR-MFGL: Image-Represented Magnetic Field Global Localization in Repetitive Environments
Hongming Shen, Shibo Yang, Xun Chen, Zhenyu Wu, Qiyang Lyu, Wei Wang, Huiqin Zhou, Danwei Wang
IEEE Robotics and Automation Letters
S-GPR: Sliding Gaussian Process Regression-based Magnetic Mapping and Evaluation of Different Magnetic Mapping Methods
Qiyang Lyu, Zhenyu Wu, Hongming Shen, Wei Wang, Jun Zhang, Huiqin Zhou, Danwei Wang
IECON 2024 - 50th Annual Conference of the IEEE Industrial Electronics Society
LB-L2L-Calib: Accurate and Robust Extrinsic Calibration for Multiple 3D LiDARs with Long Baseline and Large Viewpoint Difference
Jun Zhang†, Qiyang Lyu†, Guohao Peng, Zhenyu Wu, Qiao Yan, Danwei Wang
2022 International Conference on Robotics and Automation (ICRA)
Projects
A collection of projects I have done.
Robotics / Localization
Localize the robot with a novel modality in challenging environements.
Sentosa Passenger Counting System
2021-2023Computer Vision / Target Detection
A RGBD-based system for real-time passenger counting and seat occupancy detection on Sentosa open-air trams.
Robotics / Calibration
A calibration framework for long-baseline multi-LiDAR systems to accurately align distant sensors in V2X traffic scenarios.
Publications
A collection of my research work.
Preprints
arXiv preprint
2026RoSLAC: Robust Simultaneous Localization and Calibration of Multiple Magnetometers
Qiyang Lyu, Zhenyu Wu, Wei Wang, Hongming Shen, Danwei Wang
arXiv preprint
2026MIL-LC: A Robust Magnetometer-Inertial-LiDAR Fusion Multimodal Localization Framework
Qiyang Lyu, Zhenyu Wu, Wei Wang, Hongming Shen, Danwei Wang
Journal Articles
IEEE Transactions on Industrial Electronics
2026MC-Mapping: Magnetic-Aware Collaborative Mapping in Perceptually Degraded Environments
Zhenyu Wu, Wei Wang, Hongming Shen, Qiyang Lyu, Tianchen Deng, Guohao Peng, Huiqin Zhou, Danwei Wang
IEEE Robotics and Automation Letters
2025IR-MFGL: Image-Represented Magnetic Field Global Localization in Repetitive Environments
Hongming Shen, Shibo Yang, Xun Chen, Zhenyu Wu, Qiyang Lyu, Wei Wang, Huiqin Zhou, Danwei Wang
Conference Papers
2025 IEEE 28th International Conference on Intelligent Transportation Systems (ITSC)
2025L2M-Calib: One-Key Calibration Method for LiDAR and Multiple Magnetic Sensors
Qiyang Lyu, Wei Wang, Zhenyu Wu, Hongming Shen, Huiqin Zhou, Danwei Wang
2025 IEEE 28th International Conference on Intelligent Transportation Systems (ITSC)
2025C3M: Collaborative Magnetic-Aware Map-Merging for Intelligent Vehicles in Degraded Environments
Zhenyu Wu, Wei Wang, Hongming Shen, Qiyang Lyu, Mingxing Wen, Guohao Peng, Danwei Wang
IECON 2024 - 50th Annual Conference of the IEEE Industrial Electronics Society
2024S-GPR: Sliding Gaussian Process Regression-based Magnetic Mapping and Evaluation of Different Magnetic Mapping Methods
Qiyang Lyu, Zhenyu Wu, Hongming Shen, Wei Wang, Jun Zhang, Huiqin Zhou, Danwei Wang
2024 18th International Conference on Control, Automation, Robotics and Vision (ICARCV)
2024CT-MLO: Voxel-Based Multi-LiDAR Odometry Using Continuous-Time Kalman Filter
Hongming Shen, Zhenyu Wu, Wei Wang, Qiyang Lyu, Huiqin Zhou, Yeqing Zhu
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
2024IDF-MFL: Infrastructure-free and Drift-free Magnetic Field Localization for Mobile Robot
Hongming Shen, Zhenyu Wu, Wei Wang, Qiyang Lyu, Huiqin Zhou, Danwei Wang
2024 IEEE International Conference on Robotics and Automation (ICRA)
2024LB-R2R-Calib: Accurate and Robust Extrinsic Calibration of Multiple Long Baseline 4D Imaging Radars for V2X
Jun Zhang, Zihan Yang, Fangwei Zhang, Zhenyu Wu, Guohao Peng, Yiyao Liu, Qiyang Lyu, Mingxing Wen, Danwei Wang
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
2023LB-L2L-Calib 2.0: A Novel Online Extrinsic Calibration Method for Multiple Long Baseline 3D LiDARs Using Objects
Jun Zhang, Qiao Yan, Mingxing Wen, Qiyang Lyu, Guohao Peng, Zhenyu Wu, Danwei Wang
2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC)
2023NTU4DRadLM: 4D Radar-Centric Multi-Modal Dataset for Localization and Mapping
Jun Zhang, Huayang Zhuge, Yiyao Liu, Guohao Peng, Zhenyu Wu, Haoyuan Zhang, Qiyang Lyu, Heshan Li, Chunyang Zhao, Dogan Kircali, Sanat Mharolkar, Xun Yang, Su Yi, Yuanzhe Wang, Danwei Wang
2023 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM)
2023APC: Automatic Passenger Counting and Seat Occupancy Detection for Sightseeing Tram based on 3D LiDAR and Camera
Yiyao Liu, Qiyang Lyu, Jun Zhang, Xudong Suo, Chaoyu Hong, Lin Lin, Danwei Wang
2023 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM)
2023Magnetic Field-Aided Global Localization in Repetitive Environments
Zhenyu Wu, Wei Wang, Haoyuan Zhang, Jun Zhang, Qiyang Lyu, Danwei Wang
2023 IEEE International Conference on Robotics and Automation (ICRA)
2023Global Localization in Repetitive and Ambiguous Environments
Zhenyu Wu, Wei Wang, Jun Zhang, Qiyang Lyu, Haoyuan Zhang, Danwei Wang
2022 International Conference on Robotics and Automation (ICRA)
2022LB-L2L-Calib: Accurate and Robust Extrinsic Calibration for Multiple 3D LiDARs with Long Baseline and Large Viewpoint Difference
Jun Zhang†, Qiyang Lyu†, Guohao Peng, Zhenyu Wu, Qiao Yan, Danwei Wang
CV
Education
Nanyang Technological University, PhD in Electrical and Electronic Engineering, 2022 - Present
- Research focus: magnetic perception, autonomous robot localization, sensor calibration
Nanyang Technological University, MSc in Computer Control and Automation, 2020 - 2021
- Research focus: sensor calibration
University of Electronic Science and Technology of China, BEng in Electronic Information and Engineering, 2016 - 2020
- Graduated with First Class Honours
Experience
Research Associate Nanyang Technological University 2021 - 2026
- Developed robot perception and localization systems for magnetic-field localization, multi-LiDAR calibration, and 3D LiDAR/RGB passenger counting.
- Applied Python, C++, MATLAB, ROS, sensor fusion, point-cloud processing, and optimization to support publications, demos, and MagLoc productization.
Skills
- Programming: Python, C++, MATLAB, LaTeX
- Data Analysis: NumPy, SciPy
- Languages: Chinese (Native), English (Fluent)
Awards & Honors
- Bronze Prize in The “Chunhui Cup” Oversea Students Innovation and Entrepreneurship Competition - MOE and MOST of China (2024)