Fuse from Distance: Long-baseline Calibration for Multiple LiDAR Sensors
2020-2022Robotics / Calibration
LB Multiple LiDAR Calibration (Gen-1)
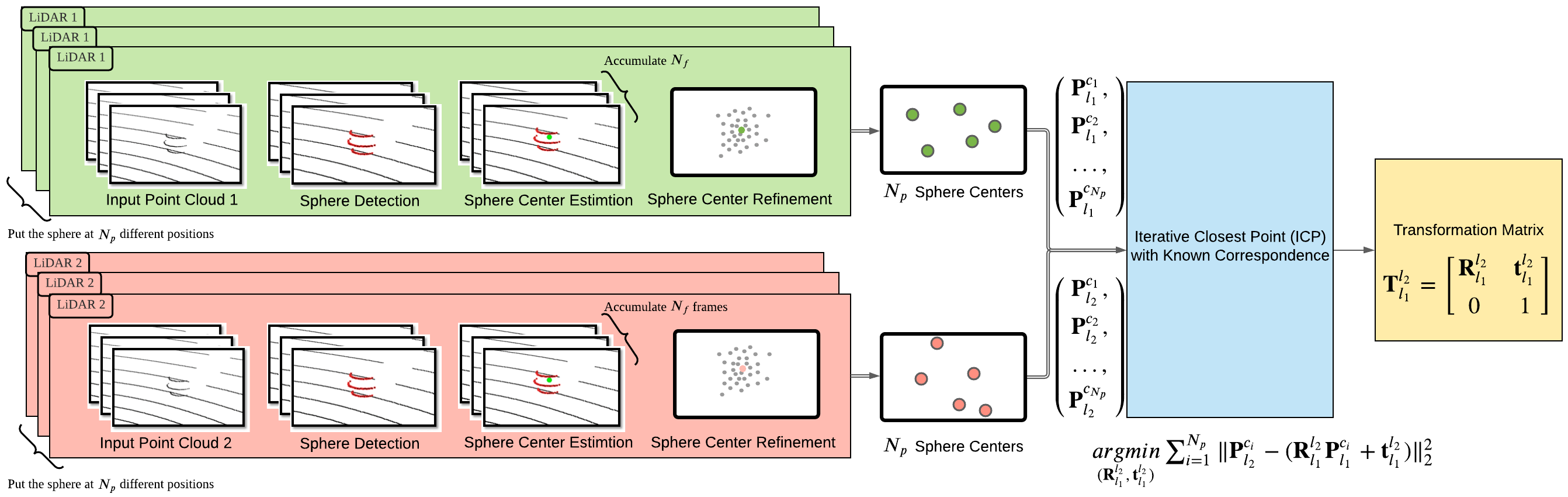
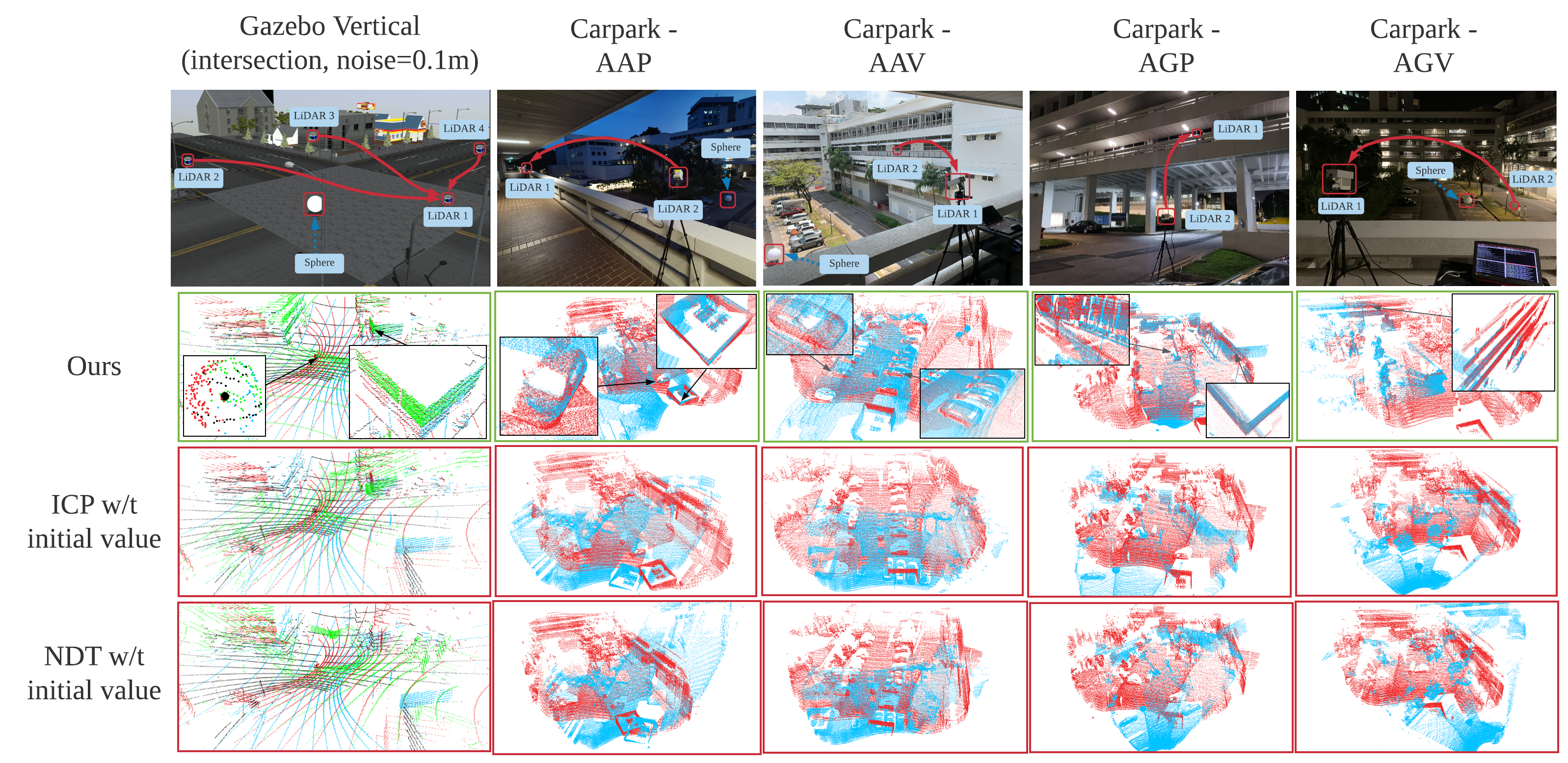
Multi-LiDAR system is an important part of V2X (Vehicle to Everything) to enhance the perception information for unmanned vehicles. To fuse the information from multiple 3D LiDARs, accurate extrinsic calibration between the LiDARs is essential. However, the existing multi-LiDAR calibration methods mainly focus on short baseline scenarios, where multiple LiDARs are closely mounted on a single platform (e.g., an unmanned vehicle). Besides, most methods typically use a planar target for calibration. Some of the methods require the motion of the multi-LiDAR system. The above conditions severely limit the application of these methods to V2X, where LiDARs are non-movable, the baseline and viewpoint difference between the LiDARs can be very large. In order to meet these challenges, we propose an accurate and robust extrinsic calibration method for long baseline multiLiDAR systems, named LB-L2L-Calib (Large Baseline LiDAR to LiDAR extrinsic Calibration). (1) We use a sphere as the calibration target for multiple LiDARs with large viewpoint difference, leveraging the viewpoint-invariance of the sphere. (2) A improved sphere detection and sphere center estimation strategy is introduced to detect and extract the sphere center from a cluttered point cloud in large-scale outdoor scenario. (3) A extrinsic parameter regression scheme is introduced. Both simulation and real experiments demonstrate that LBL2L-Calib is highly accurate and robust. Quantitative results show that the rotation and translation error is less than 0.01m and 0.01◦ (in simulation, Gauss noise 0.03m, the distance and viewpoint difference between two LiDARs is more than 30m and 90◦).
2022 International Conference on Robotics and Automation (ICRA)2022LB-L2L-Calib: Accurate and Robust Extrinsic Calibration for Multiple 3D LiDARs with Long Baseline and Large Viewpoint DifferenceJun Zhang, Qiyang Lyu, Guohao Peng, Zhenyu Wu, Qiao Yan, Danwei WangDOI
LB Multiple LiDAR Calibration (Gen-2)
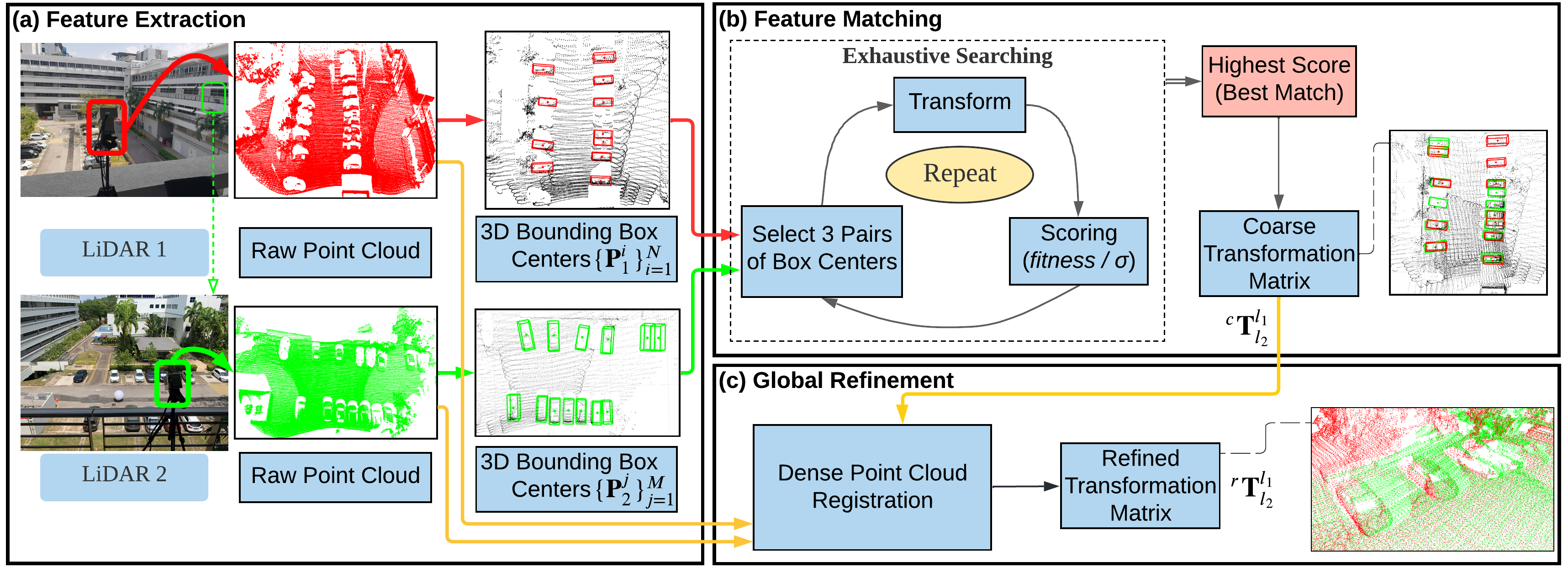
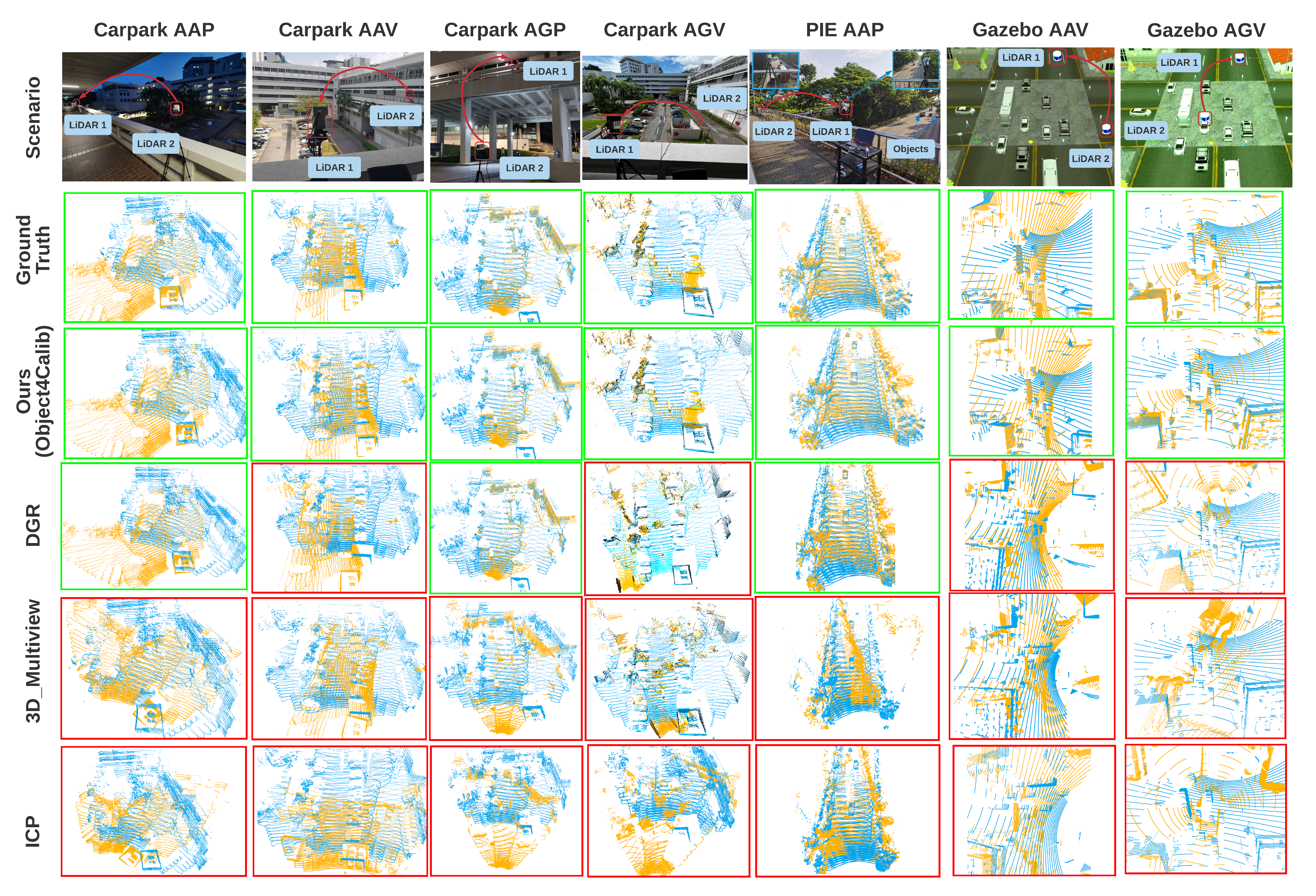
Current solution require a specific target being set up (e.g., a sphere). However, it is time-consuming, sometimes even inconvenient, to set up specific targets, e.g., at busy intersections and highways. Furthermore, specific features do not always exist in the traffic scenario. Thus, the current solutions are not feasible. To address this problem, a novel extrinsic calibration method is proposed in this paper, namely LB-L2L-Calib 2.0. It is the 2.0 version of our previous work. The novelties are: (1) We propose to use the easily accessible objects on the road as features for calibration (i.e., the vehicles). Thus, it is not necessary to set up any specific targets and we do not need to worry whether specific features exist or not. The key point is we observed that the 3D bounding box centers of the vehicles are viewpoint-invariant from different viewpoints, which makes them ideal features for long baseline and large viewpoint-difference calibration. (2) To establish correct correspondence between the bounding box centers detected from different LiDARs, we propose an exhaustive searching strategy. It can robustly output correct correspondence. Extensive experiments are performed in three scenarios (simulation: intersection, real: carpark and highway), with two types of LiDAR (Velodyne and Livox), demonstrating that LB-L2L-Calib 2.0 is robust, effective, and accurate.
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)2023LB-L2L-Calib 2.0: A Novel Online Extrinsic Calibration Method for Multiple Long Baseline 3D LiDARs Using ObjectsJun Zhang, Qiao Yan, Mingxing Wen, Qiyang Lyu, Guohao Peng, Zhenyu Wu, Danwei WangDOI