Sensing the Invisible: Ambient Magnetic-field Based Localization for Autonomous Robot
2022-2026Robotics / Localization
Ambient Magnetic-Field Based Localization
PhD · 2022 - 2026
Magnetic-field mapping + Sensor calibration + Real-time robot localization
How to represent the magnetic information?
Efficient Magnetic-Field Mapping
Map Construction
Build compact spatial magnetic signatures from ambient field measurements for GNSS-denied and visually degraded environments.
How are raw readings made reliable?
Multi-Sensor Calibration and Compensation
Calibration
Estimate sensor bias, robot-frame alignment, and interference effects so magnetic observations remain comparable across runs.
How does the robot localize online?
Real-Time Magnetic Localization
ROS Deployment
Fuse live magnetic observations with robot motion cues to support infrastructure-free localization during autonomous navigation.
Overview
A four-year Ph.D. research and productized project exploring ambient magnetic-field sensing for autonomous robot localization. The work develops an infrastructure-free localization framework that uses stable, location-dependent magnetic features to support robot navigation in repetitive, visually degraded, and GNSS-denied environments. It covers efficient magnetic-field mapping, multi-sensor calibration, real-time localization, and ROS-based system implementation for mobile robots.
Highlights
- Novel infrastructure-free modality: Uses ambient magnetic fields for robot localization in GNSS-denied and visually ambiguous environments.
- Complete magnetic localization solution: An end-to-end framework covering sensing, mapping, calibration, localization, and deployment.
- Efficient and practical system design: Validated on platforms ranging from small indoor Scout Mini robots to multi-ton seaport prime movers.
- Strong research and product output: 10 papers in top journals and conferences, including 4 first-author papers.
Project Details
What is ambient magnetic field and why?
Autonomous robot localization in GPS-denied enclosed or semi-enclosed environments, such as offices, hotels, hospitals, supermarkets, and indoor car parks, remains challenging. Infrastructure-based methods, including QR codes and RFID, require costly maintenance and lack flexibility, while onboard sensing methods, such as LiDAR- and camera-based localization, can fail in geometrically ambiguous spaces or crowded scenes with frequent occlusions.
Ambient magnetic field (AMF)-based localization offers a promising alternative. Inspired by birds’ use of the Earth’s magnetic field for navigation, this approach exploits spatially stable magnetic anomalies caused by ferromagnetic structures such as steel bars, cables, and pipes. These anomalies create location-specific magnetic fingerprints. As with LiDAR- or vision-based localization, AMF-based localization first requires building a magnetic map, after which new magnetic measurements are matched against the map to estimate the robot’s position.
Magnetic Map Construction
Magnetic map building serves as the basis and prerequisite component for MF-based localization tasks. The well-acknowledged Gaussian Process Regression (GPR) method can be implemented to build magnetic maps but with heavy computational burdens. Thus in this paper, we propose an efficient and accurate magnetic mapping system based on a novel Sliding-GPR (i.e., S-GPR) method, and evaluate different magnetic mapping methods. A unique region-of-interest (ROI) selection technique and a down/up-sampling method are proposed for the S-GPR to dramatically decrease the computational time while maintaining the mapping accuracy. Extensive experiments in a high-fidelity simulated warehouse and real-world car park environments show that the proposed S-GPR mapping method has exhibited the highest accuracy and relatively low computational time compared with the SOTA magnetic mapping methods.
 IECON 2024 - 50th Annual Conference of the IEEE Industrial Electronics Society2024S-GPR: Sliding Gaussian Process Regression-based Magnetic Mapping and Evaluation of Different Magnetic Mapping MethodsQiyang Lyu, Zhenyu Wu, Hongming Shen, Wei Wang, Jun Zhang, Huiqin Zhou, Danwei WangDOI
IECON 2024 - 50th Annual Conference of the IEEE Industrial Electronics Society2024S-GPR: Sliding Gaussian Process Regression-based Magnetic Mapping and Evaluation of Different Magnetic Mapping MethodsQiyang Lyu, Zhenyu Wu, Hongming Shen, Wei Wang, Jun Zhang, Huiqin Zhou, Danwei WangDOI
Offline Magnetic Sensor Calibration
Multimodal sensor fusion enables robust environmental perception by leveraging complementary information from heterogeneous sensing modalities. However, accurate calibration is a critical prerequisite for effective fusion. This paper proposes a novel one-key calibration framework named L2M-Calib for a fused magnetic-LiDAR system, jointly estimating the extrinsic transformation between the two kinds of sensors and the intrinsic distortion parameters of the magnetic sensors.
Magnetic sensors capture ambient magnetic field (AMF) patterns, which are invariant to geometry, texture, illumination, and weather, making them suitable for challenging environments. Nonetheless, the integration of magnetic sensing into
multimodal systems remains underexplored due to the absence of effective calibration techniques. To address this, we optimize extrinsic parameters using an iterative Gauss-Newton scheme, coupled with the intrinsic calibration as a weighted ridgeregularized total least squares (w-RRTLS) problem, ensuring robustness against measurement noise and ill-conditioned data. Extensive evaluations on both simulated datasets and real-world experiments, including AGV-mounted sensor configurations, demonstrate that our method achieves high calibration accuracy and robustness under various environmental and operational
conditions.
 2025 IEEE 28th International Conference on Intelligent Transportation Systems (ITSC)2025L2M-Calib: One-Key Calibration Method for LiDAR and Multiple Magnetic SensorsQiyang Lyu, Wei Wang, Zhenyu Wu, Hongming Shen, Huiqin Zhou, Danwei WangDOI
2025 IEEE 28th International Conference on Intelligent Transportation Systems (ITSC)2025L2M-Calib: One-Key Calibration Method for LiDAR and Multiple Magnetic SensorsQiyang Lyu, Wei Wang, Zhenyu Wu, Hongming Shen, Huiqin Zhou, Danwei WangDOI
Online Magnetic Sensor Calibration
Magnetometer measurements are often corrupted by distortions caused by ferromagnetic materials present on the sensor platform, which bias the AMF and degrade localization reliability. As a result, accurate magnetometer calibration to estimate distortion parameters becomes essential. Conventional calibration methods that rely on rotating the magnetometer are impractical for large and heavy platforms. To address this limitation, this paper proposes a robust simultaneous localization and calibration (RoSLAC) approach based on alternating optimization, which iteratively and efficiently estimates both the platform pose and magnetometer calibration parameters. Extensive evaluations conducted in high-fidelity simulation and real-world environments demonstrate that the proposed RoSLAC method achieves high localization accuracy while maintaining low computational cost compared with state-of-the-art magnetometer calibration techniques.
 arXiv preprint2026RoSLAC: Robust Simultaneous Localization and Calibration of Multiple MagnetometersQiyang Lyu, Zhenyu Wu, Wei Wang, Hongming Shen, Danwei Wang
arXiv preprint2026RoSLAC: Robust Simultaneous Localization and Calibration of Multiple MagnetometersQiyang Lyu, Zhenyu Wu, Wei Wang, Hongming Shen, Danwei Wang
Real-Time Magnetic Localization
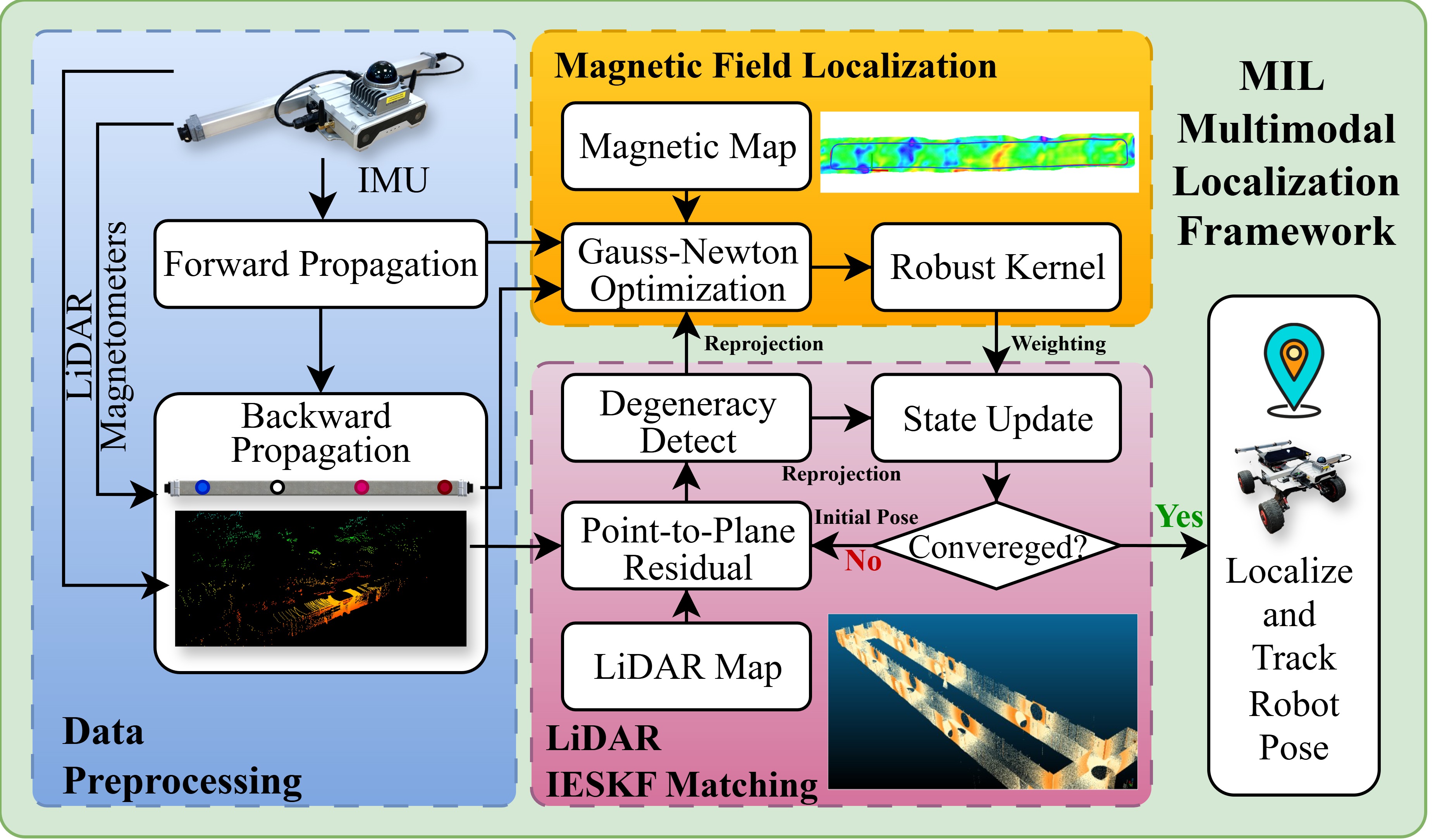
Localization in challenging environments, such as GNSS-denied, geometrically repetitive, or textureless scenes commonly found in offices, hotels, and underground parking facilities, remains an open problem for reliable autonomous mobile robot (AMR) deployment. Single-modality localization methods are inherently limited by the constraints of individual sensors. Although multimodal fusion frameworks have shown improved robustness, most existing approaches still rely heavily on geometric or texture features, or on infrastructure-based beacons, which increase installation and maintenance costs while reducing deployment flexibility. Recently, ambient magnetic field (AMF)-based localization has attracted growing attention because it does not depend on geometric or texture features, nor does it require additional infrastructure, making it a promising complementary modality for AMR localization. However, existing studies have only explored such fusion in pedestrian scenarios using smartphone-mounted sensor suites, and practical solutions for AMR systems remain largely unexplored. To address this gap, this article proposes a magnetometer-inertial-LiDAR fused multimodal localization framework with a custom-designed sensor suite, termed MIL-LC, which provides reliable localization even when LiDAR suffers from geometric degeneration or when the magnetic map changes during long-term deployment. Extensive experiments in both simulation and real-world environments demonstrate that the proposed MIL-LC framework achieves robust and accurate localization performance.
 arXiv preprint2026MIL-LC: A Robust Magnetometer-Inertial-LiDAR Fusion Multimodal Localization FrameworkQiyang Lyu, Zhenyu Wu, Wei Wang, Hongming Shen, Danwei Wang
arXiv preprint2026MIL-LC: A Robust Magnetometer-Inertial-LiDAR Fusion Multimodal Localization FrameworkQiyang Lyu, Zhenyu Wu, Wei Wang, Hongming Shen, Danwei Wang
Application Demo
Productization
The relevant algorithm and hardware have been productized as MagLoc and is now available for order from Orient Robotics.